211service.com
Velitelský robot Divers s voděodolným tabletem
Nový, překvapivě jednoduchý způsob komunikace mezi potápěči a podvodními roboty je významným přírůstkem do malého arzenálu nástrojů, které mají k dispozici provozovatelé robotických ponorek neboli ROV. Tato metoda by mohla umožnit nové druhy spolupráce potápěč/ROV na místě v obtížných situacích, jako jsou vojenské operace, sanace životního prostředí a akvakultura.

Podvodní komunikace mezi potápěči a ponornými roboty neboli ROV je téměř neřešitelný problém. Na rozdíl od ovládání pozemských robotů rádiové vlny nepřicházejí v úvahu, protože necestují daleko pod vodou a jsou snadno zkreslené. Sonar (zvuk) má nízkou šířku pásma a vyžaduje obrovské množství energie (v některých případech dostačující k poškození mořského života) a komunikaci se světlem brání vodní sníh – všechny částice plovoucí ve vodním sloupci.
Problém je opravdu dost špatný, a to do té míry, že mnoho armád neprovozuje ROV a potápěče ve stejném prostředí, protože komunikace a koordinace jsou příliš obtížné, říká Michael Jenkin, hlavní autor článku vycházejícího z York University s názvem Plavání s roboty: Komunikace mezi lidskými roboty v hloubce .

Řešením problému od Jenkina a hlavního autora Barta Verzijlenberga je vodotěsný tablet, který dokáže zobrazit stejný druh dvourozměrných čárových kódů nebo štítků, které se již používají na některých produktech, stejně jako reklamy a nálepky navržené pro čtení chytrými telefony. .
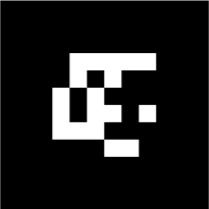
Blikání těchto štítků na podvodní kameře robota AQUA umožňuje komunikaci, která je robustní a má velkou šířku pásma ve srovnání s jinými nepřipoutanými podvodními komunikačními modalitami. V příkladu vlevo může tag 6x6 zobrazit 36 bitů, ale redundantně zobrazuje pouze 10 bitů, což odpovídá příkazu uloženému v paměti robota.
Video robota pracujícího v upoutaném režimu (níže) ukazuje jeho schopnost reagovat na tyto vizuální značky v reálném čase a přenášet video zpět do podvodního tabletu. V autonomním režimu by přenos videa nebyl možný, ale robot by byl schopen autonomně provádět úkoly a podávat zprávy přímo potápěči, místo aby cestoval celou cestu na povrch, aby komunikoval se svými manipulátory.
K dnešnímu dni byl systém testován na otevřeném oceánu a v bazénech, ale budoucí plány zahrnují pronikání ztroskotaných lodí.
 Sledujte Christophera Mimse na Twitteru , nebo kontaktujte ho e-mailem .
Sledujte Christophera Mimse na Twitteru , nebo kontaktujte ho e-mailem .